近日����,中國科學院沈陽自動化研究所智能腔鏡手術機器人研究組在連續體機器人形狀感知方面研究取得新新進展���。相關成果以為Shape Sensing for Continuum Robots by Capturing Passive Tendon Displacements with Image Sensors題發表在機器人領域期刊IEEE Robotics and Automation Letters��。
連續體機器人和軟體機器人具有高靈巧性和順應性的特點�,在醫療領域中展現出巨大的應用潛力����,然而連續體機器人的形狀反饋的缺失制約了其進一步的應用����。連續體機器人的形狀感知是實現閉環控制的前提��,將有助于提高機器人的控制精度并促進連續體機器人的智能化應用���。
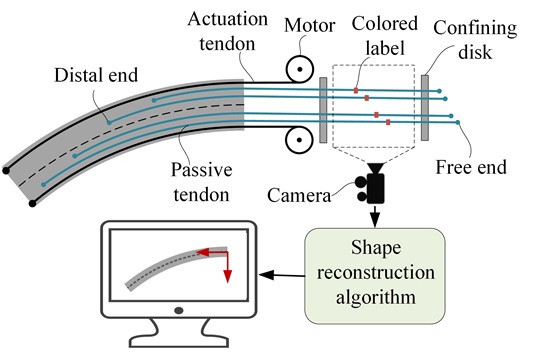
該研究提出了一種新穎的連續體機器人形狀感知方法��,通過在連續體機器人內部增加被動腱��,將連續體機器人的形狀變化轉換成被動腱的位移信息���,并通過相機實時獲得被動腱的位移�����,進而基于幾何運動旋量重建出連續體機器人的空間三維形狀��。這一方法不僅能夠獲得連續體機器人的曲率���、撓率等信息�����,也能夠感知連續體機器人的扭轉變形���,相較于其它方法具有低成本和高可靠性優點��。
沈陽自動化所智能腔鏡手術機器人研究組長期專注于消化��、腹腔���、呼吸等人體腔道微手術機器人的關鍵技術及系統研發�,先后承擔了國家重點研發計劃項目����、國家自然科學基金區域聯合重點項目等���,在靈巧型手術機器人的構型創成����、感知�����、控制以及手術導航等方面的研究取得了多項突破成果�����,形成了特色和優勢��,已完成多臺套的典型手術機器人系統�����,部分成果已經進入臨床應用階段��。近年來多篇研究成果發表在國際知名學術期刊 IEEE Transactions on Industrial Electronics (2018)���,IEEE Robotics and Automation Letters (2022,2017)�,IEEE/ASME Transactions on Mechatronics (2020���,2017)�, Computer Methods and Programs in Biomedicine(2020)�,European Respiratory Journal(2020)�。研究成果得到國內外醫療機器人領域研究人員的廣泛關注����。
該研究得到了國家自然科學基金����、國家重點研發計劃項目�����、遼寧省自然科學基金和沈陽醫工結合協同創新項目的支持����。
基于被動腱的連續體機器人形狀感知原理
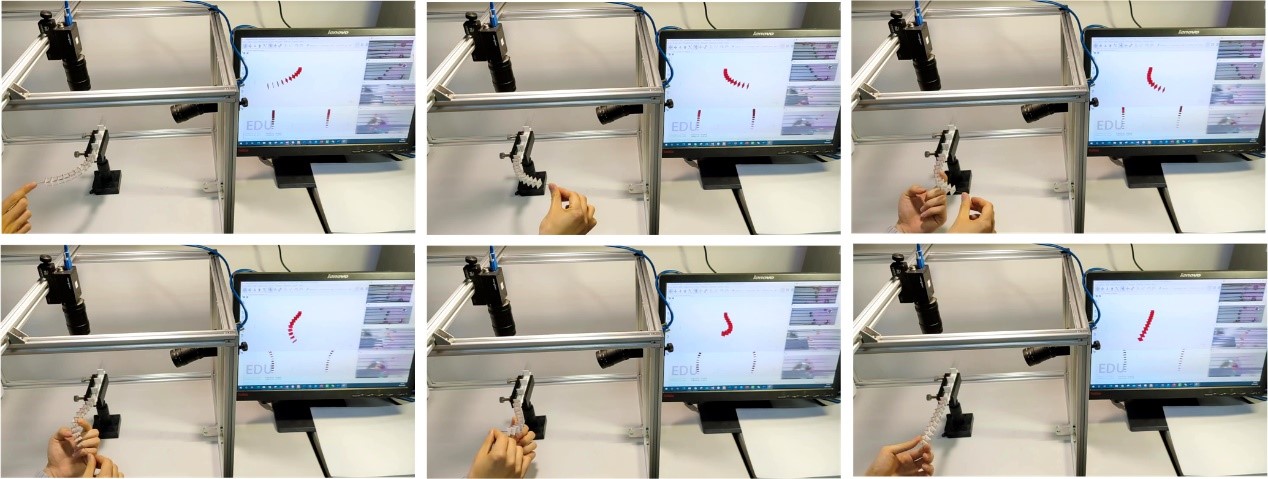
基于被動腱的連續體機器人實時形狀感知